
July 14, 2025
A micro-robot the size of a bumblebee could soon take flight while sensing its surroundings, thanks to innovations from researchers in the Autonomous Insect Robotics Laboratory (AIR Lab).
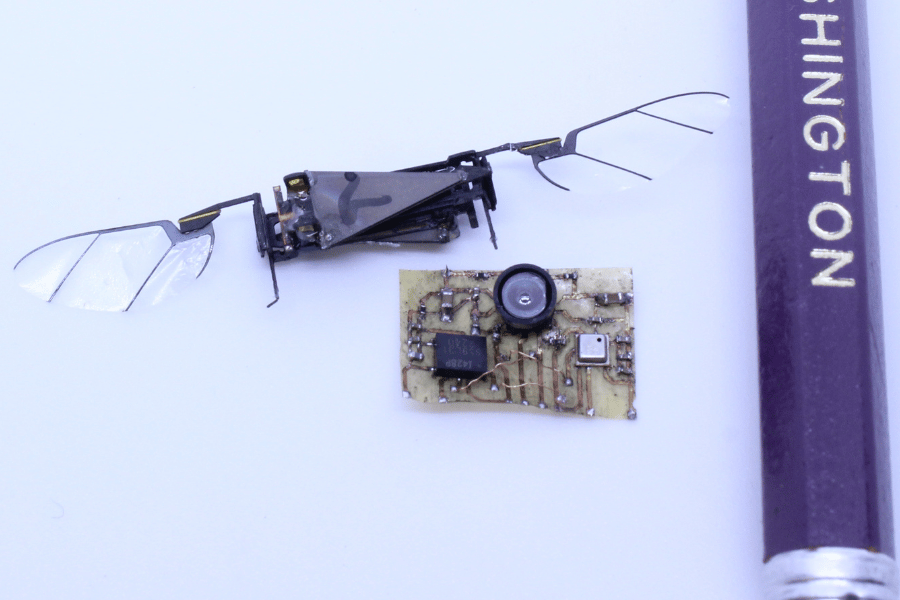
The new sensing system next to the RoboFly and a pencil. Photo provided by the AIR Lab.
Researchers from mechanical engineering (ME) and the Paul G. Allen School of Computer Science & Engineering (CSE) have developed the lightest avionics system yet for flying insect robots — a step toward documenting the lightest vehicle capable of sustained hovering. The new avionics system, fittingly called TinySense, is the first that’s capable of enabling a flying insect robot to achieve sensor autonomy, or sense surroundings independently.
The researchers recently received the Best Student Paper Award at the IEEE International Conference on Robotics and Automation for their paper “TinySense: A lighter weight and more power-efficient avionics system for flying insect-scale robots.” Led by ME Ph.D. candidate Zhitao Yu, the paper was co-authored by CSE undergraduates Joshua Tran and Claire Li; ME Ph.D. candidates Aaron Weber and Yash Talwekar; and ME Associate Professor Sawyer Fuller.

ME Ph.D. candidate Zhitao Yu presented about TinySense at the IEEE International Conference on Robotics and Automation.
“It was an exciting and unforgettable experience to present our work and share the stage with talented researchers from top universities and leading companies around the world,” says Yu, who presented the work with Li and Tran at the conference.
Insect-scale robots could be useful for a variety of applications, including search-and-rescue missions, space exploration and environmental sensing. However, unlike large drones that might carry a scanning light detection and ranging system (LIDAR) or global positioning system sensor (GPS) to navigate, the tiny robots are more limited in the sensors they can carry due to size, speed, weight and power constraints. For example, sensing and computation should take no more than 10 percent of the power needed for a drone to fly.
Weighing only 78.4 mg and consuming just 15.6 milliwatts, TinySense weighs less than a toothpick and meets the weight and power consumption requirements for the UW Robofly, a 160 mg flapping-wing flying vehicle, to have sensor autonomy.
To reach this extremely low weight and power, the team departed from the conventional sensor suite used in smaller drones in two key ways. First, they eliminated the heavy laser rangefinder, instead opting for an extremely lightweight and low power barometric pressure sensor that estimates altitude. Second, they built their own custom optic flow sensor based on a global-shutter imaging chip, which was half the weight of the smallest part available off the shelf. Optical flow is how fast an image is moving across a visual scene. By making these changes, they improved on the previous lightest sensor suite, created by the AIR Lab in 2022, which weighed 187 mg and consumed 21 milliwatts of power.
ME Ph.D. candidate Zhitao Yu and CSE undergraduates Joshua Tran and Claire Li presenting their research at the IEEE conference.
The TinySense was tested on board a flight on the Crazyflie, a palm-sized quadrotor drone with four rotors. They found that TinySense demonstrated accurate estimates of its behavior, such as pitch angle, translational velocity and altitude, while flying in experiments.
“The team did an excellent job on this project, which is a great example of the vertical integration we like to do in the AIR Lab,” Fuller says. “They tackled everything from microfabrication to advanced estimation algorithms. They built the lens system of a tiny optic flow camera, created an ultra-lightweight flexible circuit, and implemented software on a microcontroller to take raw pixels and compute optic flow. Lastly, they ran flight tests on a small drone and tuned a sophisticated estimation system to get maximum performance.”
Talwekar says that the AIR Lab plans to use the TinySense on the UW RoboFly. This would then be the lightest sensor autonomous vehicle capable of sustained hovering.
Though Yu will soon graduate with his Ph.D., he will remain involved as the AIR Lab transitions TinySense onto RoboFly. The lab expects to have a demo by the end of the year.
“I’ll keep working with my labmates to integrate the sensor suite onto RoboFly, refine the state-estimation and control algorithms, and run free-flight tests that realize the sensor autonomy of flying insect-scale robots,” Yu says.
Read a related blog from the Allen School.