
By Lyra Fontaine
From modeling and fabricating prototypes to designing, simulating and implementing controls systems, ME students are using their engineering skills to help improve safety at construction sites and surrounding areas.
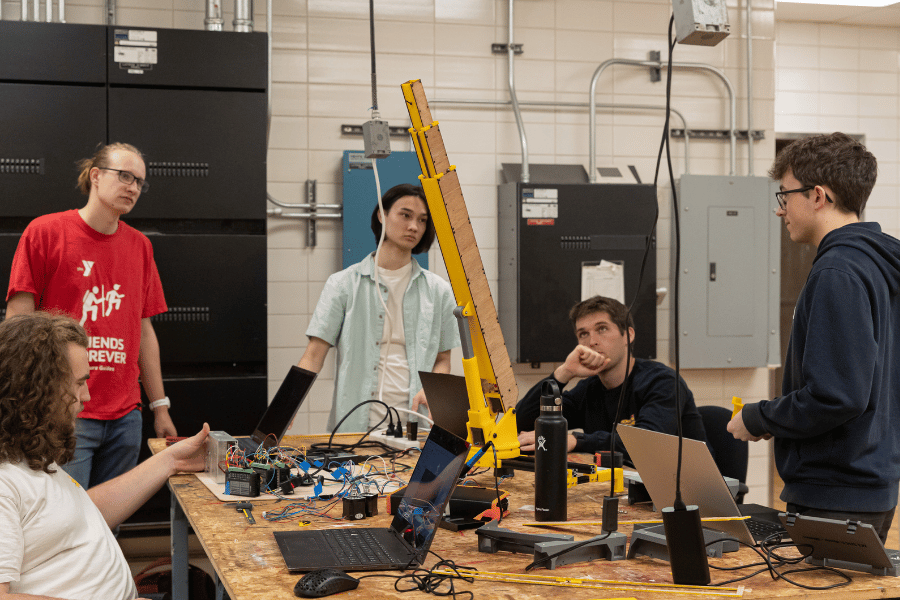
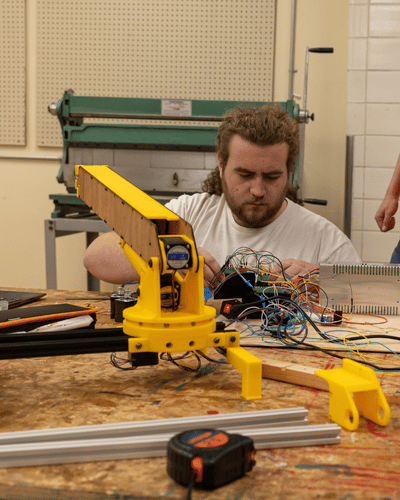
An ME capstone team working on building a small-scale version of a mobile crane that can notify the crane operator of unstable conditions. Photo by Sara Coulsey/UW Photo.
Accidents involving tower cranes on construction sites or mobile cranes in warehouses can be catastrophic. In 2019, a tower crane being dismantled in Seattle collapsed into traffic, killing four people. Among the lives lost was Sarah Pantip Wong, whose family is now working with legislators and research collaborators to prevent future tragedies through the Georgia Tech Crane Safety Research Center.
UW is a partner of the Crane Safety Research Center, and the UW lead ME Professor Santosh Devasia is applying his expertise in iterative control and human-machine interaction to improve crane safety alongside undergraduate and graduate students.
“We’re working on how to help people operate machines safely using automation,” Devasia says. “We want to prevent crane accidents to make our communities safer.”
Recently, undergraduate capstone teams advised by Devasia used their knowledge of mechatronics and control systems to notify crane operators of potential accidents and correct for unstable conditions.
Preventing tower crane snag
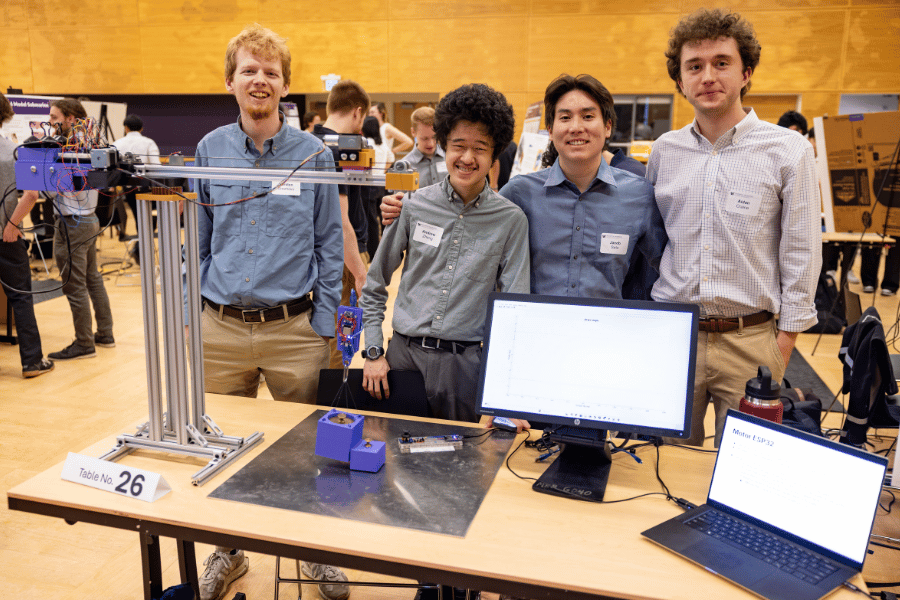
An ME capstone team designed a sensor-based system to detect when their model crane might snag and correct for the snag to prevent further damage. Photo by Matt Hagen.
Cranes getting caught on ground objects can lead to damage and injury. At a 2019 accident in Massachusetts, a tower crane and its payload dragged beams off of a building at a construction site, killing one person and injuring two others.
To address this problem, an ME capstone team designed a sensor-based system to not only detect when a crane might snag, but also automatically correct for the snag to prevent further damage. The control system could make a difference for crane operators.
“After talking to crane operators and state regulators, we discovered that operators are concerned that they can’t see well from their cabins and need to communicate with workers on the ground,” says capstone team member Andrew Zheng (BSME ’25). “Crane drivers said that a contingency would be helpful to detect whether the crane may snag.”
The team built a model tower crane with a five-pound lift capability, wireless controls and a maximum trolley speed of 0.13 feet per second, similar to a real-life crane. The crane has an arm that rotates as well as moves up and down, and lets out a cable to lower objects down or hoist them up. A trolleying system with wheels moves across the arm, or jib, to move loads horizontally.
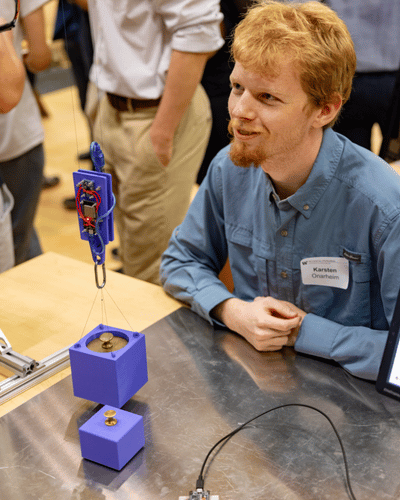
The crane has an arm that rotates as well as moves up and down, and lets out a cable to lower objects down or hoist them up. Photo by Matt Hagen.
To inform workers when the crane might snag, the team decided to rapidly measure the cable angle. To do this, they added an angle sensor on the crane’s block, which is attached to the cable and the hook that picks up ground objects. The sensor feeds the cable angle to a microcontroller that disconnects all motors if the angle is past 3 degrees. Then, the operator can choose to return the payload to a vertical position or press “override.”
“When the trolley on the arm pulls the payload, the trolley registers when it hits or catches an object on the ground, so we can prevent it from moving forward,” says team member Jacob Seto (BSME ’25). “Then the trolley can go back and align with the payload so the cable is straight. The controls system reduces the angle to zero.”
Students said they were interested in applying what they’d learned in mechatronics classes to a tower crane’s moving parts. Their skills helped them implement the controls system and select electronic components to create the prototype.
“We gained design experience through figuring out what materials are important and how to integrate them in a timely manner into a robust working prototype,” says team member Aidan Craine (BSME ’25).
Karsten Elijah Onarheim and Lexi Shurygailo also worked on the project.
Reducing mobile crane accidents
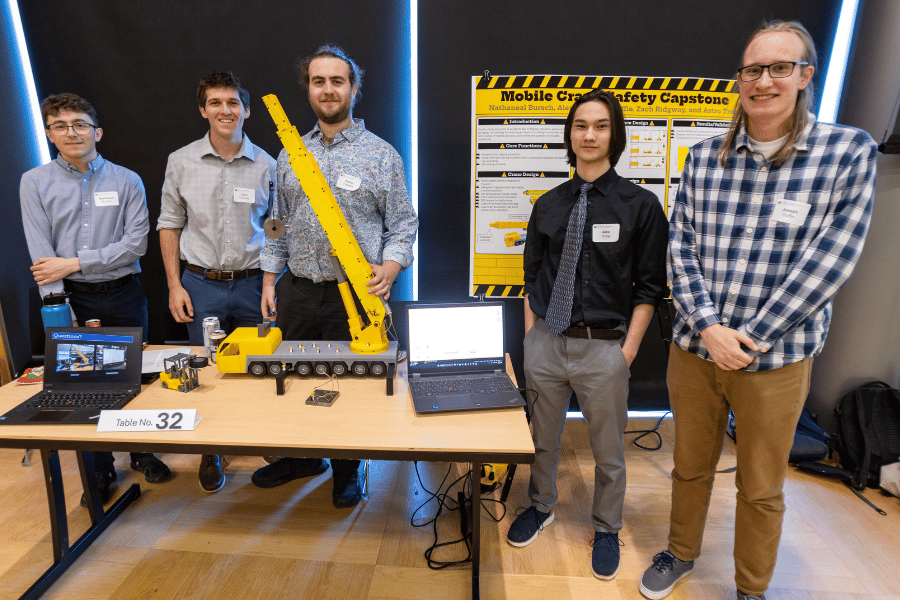
The team built a model of a mobile crane that has a "tip prevention" mode. Photo by Matt Hagen.
Another ME capstone team focused on improving the safety of mobile cranes, which are on wheels with a smaller base. Mobile cranes are more prone to tipping over than static cranes, leading to damage and injury. In early 2025, a mobile crane accident in Everett injured two people.
“Our goal is to implement systems to prevent cranes from tipping over, which can happen because the load is too great or the crane is extended too far,” says capstone team member Nathaneal Bursch (BSME ’25).
The team built a small-scale version of a mobile crane that can move in four directions. After simulating their controls system, they developed a visual interface that shows the top, side and rear views of the crane, and computes the center of gravity in real time, to notify the crane operator of unstable conditions.
A “tip prevention” mode locks movement once bearing 2% of the tipping angle. When the center of gravity goes near the outriggers or the crane’s support structures, the machine is in danger of tipping. The screen displays yellow or red warning lights, depending on the percentage of the maximum range allowed.
“The visual interface accurately warns the user when tipping is imminent,” says capstone member Joseph Duffie (BSME ’25).
The students developed a controls system to notify the crane operator of unstable conditions. Photo by Sara Coulsey/UW Photo.
The team, which visited a company specializing in heavy lift and transport, hopes their project could help simplify and automate crane operators’ current decision-making process.
“Operators have to sift through a large binder of data and graphs to see how much they can load or extend the crane,” says capstone member Zach Ridgway (BSME ’25). “We’re trying to streamline this process for operators to reduce room for error and make it dynamic so as the crane is moving, they can see how close they are to being in a dangerous zone.”
Though the students had learned about controls in classes and labs, the project enabled them to apply their mechatronics skills to a real-world problem.
“We had hands-on opportunities to use theories that we’ve learned about in mechatronics classes to develop this entire system and implement controllers,” Bursch says.
The team was also excited to provide a technological solution for the construction industry. Ridgway adds that he saw firsthand how technology can be lagging in the industry when he worked as a general contractor.
“It was exciting to build a working prototype that could improve safety and actually help people,” says team member Alex Cong (BSME ’25).
Astro Trebach was also part of the capstone team.
Originally published July 21, 2025