
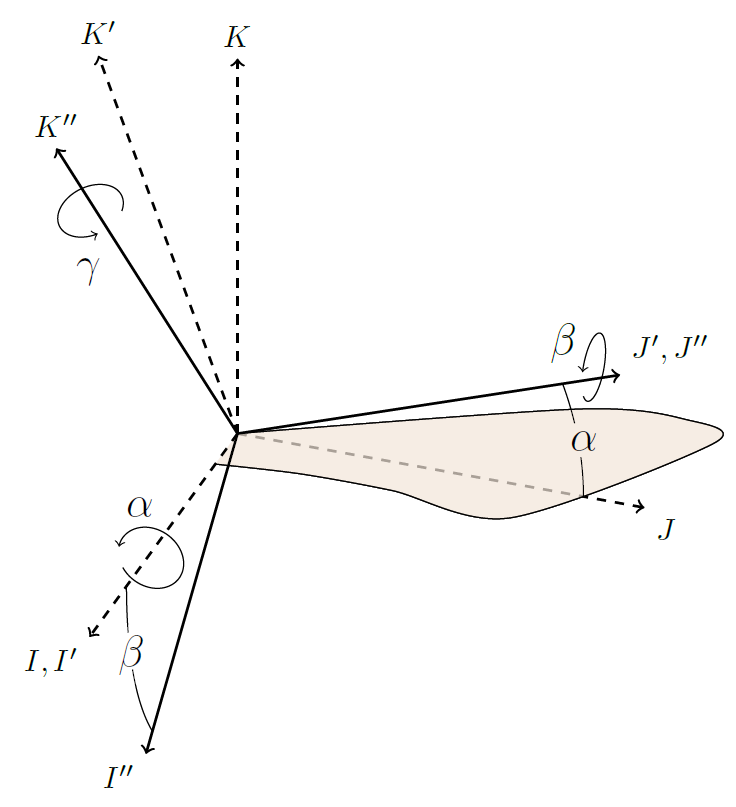
The model is developed by treating the forewing as an elastic body subject to three-dimensional rotation about a fixed point on the insect body or wing hinge. Two finite rotations (roll, denoted by α, and pitch, denoted by β) establish a rotating coordinate frame with angular velocity  while a third infinitesimal rotation (yaw, denoted by γ) is independent of the rotating coordinate frame (Fig. 1). A position vector is drawn from the point of rotation to a differential mass element on the wing (Fig. 2). The position vector includes an out-of-plane elastic deformation
while a third infinitesimal rotation (yaw, denoted by γ) is independent of the rotating coordinate frame (Fig. 1). A position vector is drawn from the point of rotation to a differential mass element on the wing (Fig. 2). The position vector includes an out-of-plane elastic deformation  , and is expanded via an eigenfunction expansion such that
, and is expanded via an eigenfunction expansion such that  , where
, where  is the
is the  mode shape found using finite element analysis and
mode shape found using finite element analysis and  is the time-dependent modal response to be determined. Finite element analysis is also used to find the natural frequency,
is the time-dependent modal response to be determined. Finite element analysis is also used to find the natural frequency,  .
.
 |
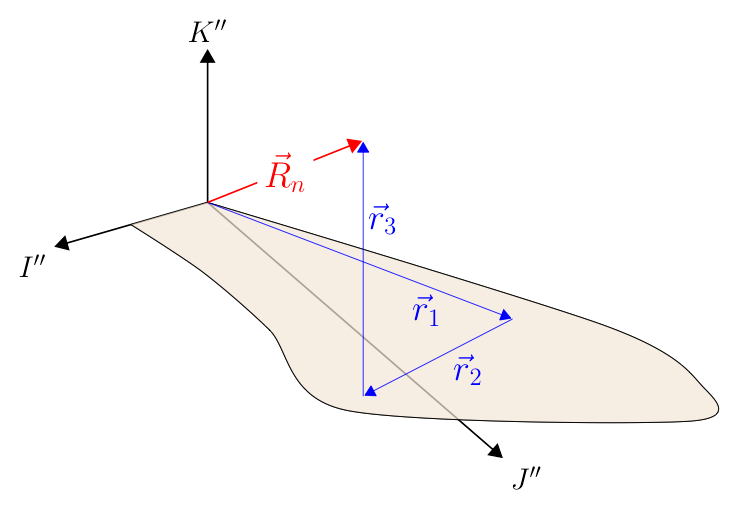 |
| Fig. 1: Rotating Coordinate Frame | Fig. 2: Position vector to differential mass |
The position vector is differentiated with respect to time to find the velocity of the differential mass. The kinetic energy of the differential mass is determined and integrated over the entire wing to determine the total kinetic energy. Potential energy is determined by integrating a quadratic, symmetric strain energy density function over the domain of the wing. For convenience, two constants are defined as  and
and  , where represents a vector from the point of rotation to the inertial force center of the kth mode and represents a 90 degrees counterclockwise rotation from . The kinetic and potential energies are then discretized and subjected to Lagrange’s equation, yielding the following equation of motion:
, where represents a vector from the point of rotation to the inertial force center of the kth mode and represents a 90 degrees counterclockwise rotation from . The kinetic and potential energies are then discretized and subjected to Lagrange’s equation, yielding the following equation of motion:
 |
The above equation is solved for each mode considered via a MATLAB script (see attached file under experimental set-up and results). Included here is the CAE Model of the paper wing used to simulate the forewing of the Manduca sexta and the CAE model of the experimental wing. The theoretic model can be downloaded here. Furthermore, a presentation of the above information is available on YouTube and can be found by clicking this link.